
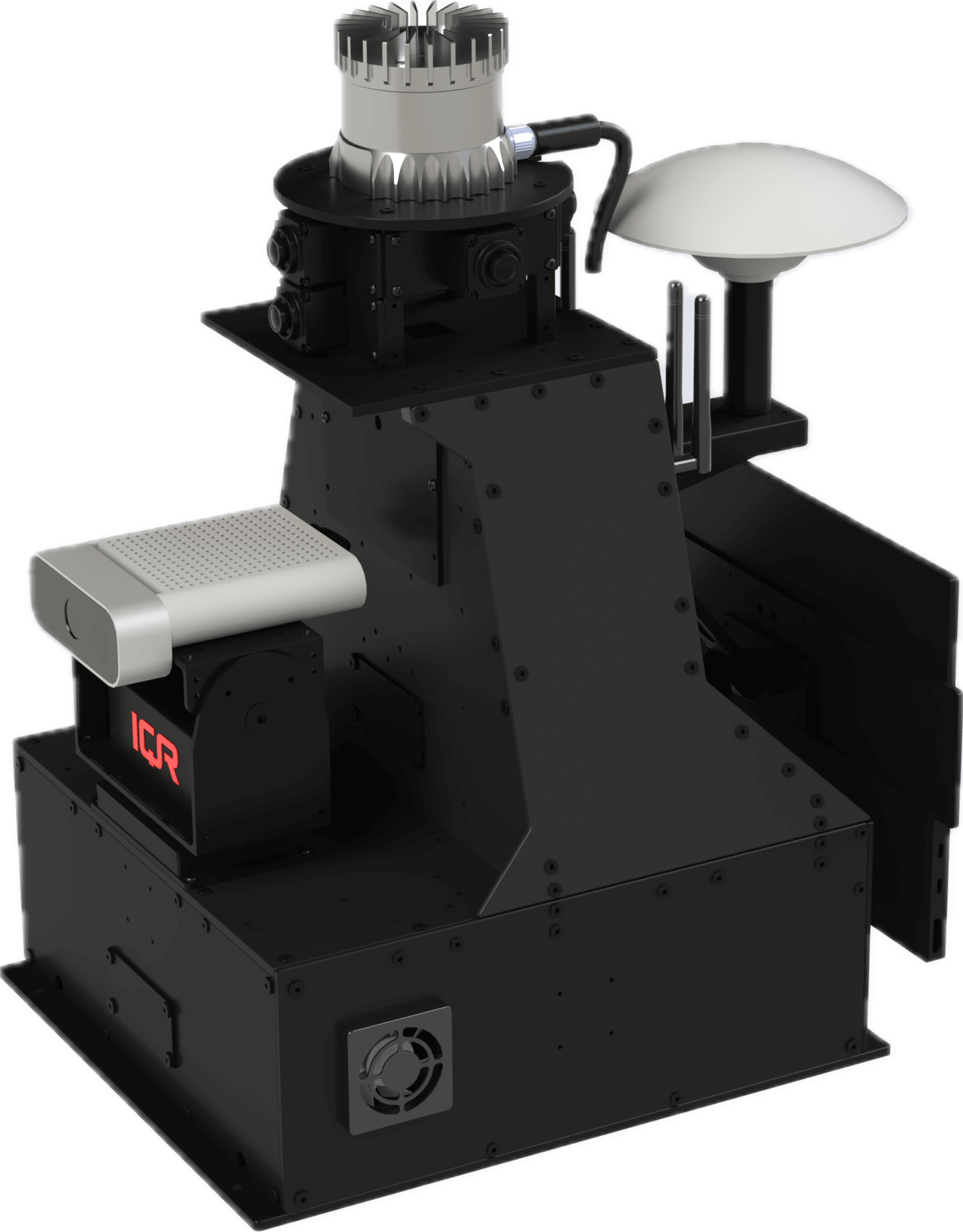
機器人上裝產品概述
智科特多模態傳感器上裝為移動機器人開發者打造零門檻、高精度、全融合、高性價比的環境感知解決方案,適配市場主流移動機器人產品,讓用戶能迅速開展科研、應用工作。
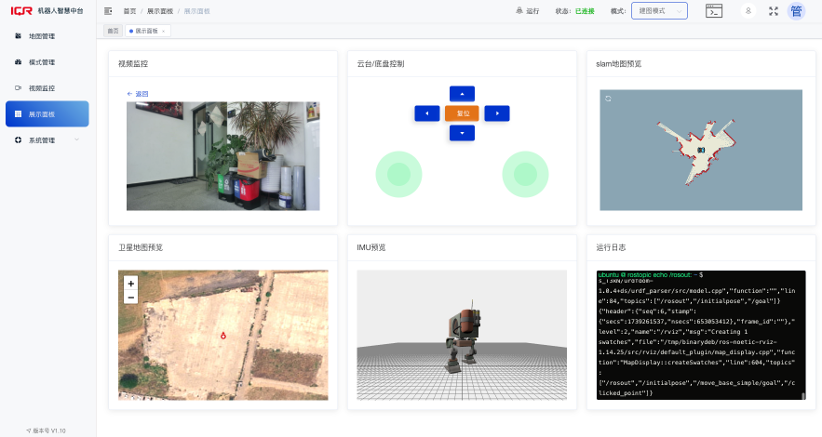
對于非機器人領域用戶,我們開發了完整的機器人中臺軟件,用戶可以在不操作ROS的情況下,使用機器人完成領域應用。
零門檻使用
無需深厚ROS知識
高精度感知
多傳感器融合技術
全融合方案
多模態數據融合
高性價比
降低研發成本
核心功能
專為已選定移動機器人平臺的科研用戶打造的全方位解決方案
多源傳感器融合體系
兼容激光雷達、視覺模組、慣性導航主流傳感器,構建多模態感知網絡,實現環境的全方位精準感知。
- 激光雷達數據融合
- 視覺模組深度感知
- 高精度慣性導航
- 多模態數據同步處理
可擴展研發框架
預留二次開發接口,適配 SLAM、環境建模研究方向的技術迭代需求,加速科研創新。
- 開放API接口
- SLAM算法適配
- 環境建模工具鏈
- 技術迭代兼容性
廣泛的應用場景
科研教育
高校機器人實驗室教學與研究
工業巡檢
工廠自動化與設備巡檢
醫療服務
醫療機器人與輔助系統
物流倉儲
智能倉儲與物流機器人
機器人上裝系列產品
根據不同應用場景和需求,提供多樣化的產品選擇
科研專用
科研版
¥3.5萬面向高校和研究機構的高端解決方案,提供更強大的計算能力和更豐富的接口,支持復雜算法研發。
核心配置
- 32線激光雷達
- 云臺深度視覺系統
- 差分GPS
- 多機系統支持
- 二次開發工具包
熱門選擇
應用版
¥10.5萬(根據所選配置調整)面向商業應用的標準化解決方案,提供穩定可靠的環境感知能力,滿足大多數移動機器人應用需求。
核心配置
- Ouster OS1 64線激光雷達
- 深度視覺系統
- 高精度IMU
- 機器人中臺
- GMSL2接口
產品參數對比
| 參數配置 | 科研版 | 應用版 |
|---|---|---|
| 上裝版本 | 科研版 | 應用版 |
| 底盤 | ROS移動平臺 | ROS移動平臺 |
| 計算單元 | Nvidia Orin NX | 米文動力 AD10 |
| 激光雷達 | 速騰聚創 Helios32 | 速騰聚創 Helios32 |
| 深度相機 | 奧比中光 Femto Bolt | 奧比中光 Femto Bolt |
| 差分GPS | Wit WTRTK 4GA | Wit WTRTK 4GA |
| IMU | Wit HWT 6052 | Wit HWT 6052 |
| 顯示器 | 9寸顯示器 | 13.3寸顯示器 |
| 接口配置 | 4×USB3.0, 2×千兆網口, HDMI 2.1, GMSL2, Wi-Fi 6, 藍牙5.0, RS232/RS485, 2×CAN FD | 4×USB3.0, 2×千兆網口, HDMI 2.1, GMSL2, Wi-Fi 6, 藍牙5.0, RS232/RS485, 2×CAN FD |
| 多機系統支持 | 支持 | 支持 |

技術規格
全面的硬件配置與軟件系統參數
激光雷達
- 型號 64線/32線可選
- 探測距離 0.5-200m
- 角分辨率 0.2°×0.2°
- 掃描頻率 10Hz/20Hz可選
視覺系統
- 類型 深度視覺系統
- 分辨率 1920×1080
- 幀率 30fps
- 視場角 水平90°×垂直65°
定位系統
- IMU 6軸高精度IMU
- GPS 差分GPS(科研版)
- 定位精度 厘米級(RTK模式)
處理器
- 型號 Nvidia Orin NX
- CPU 6核ARM Cortex-A78AE
- GPU 1024 CUDA Cores
- 內存 8GB/16GB LPDDR5